

摄影作品
个人摄影作品鉴赏 自2022年7月21日,在家人的支持下购入相机索尼α6300已有近一年的时间。为了留存记忆,也是为了对个人摄影爱好的一个总结,特此在本博客开发此页面,以供个人与各位朋友欣赏与批评指正。
人像
包含了一些朋友和摄影活动上记录的
风景
一些风景,也有扫街和杂图嗷
猫
猫猫是世界上最可爱的
扫街
随手拍

Sky|影像
25中秋
包含了一些朋友和摄影活动上记录的
McuOTA
前言先从最简单的无校验跳转开始:1234567891011121314//1.定义APP地址uint32_t APP_ADDRESS=0x08008000;typedef void (*pFunction) (void);void JumpToApplication(void) { if (((*(__IO uint32_t*)APP_ADDRESS) & 0x2FFE0000) == 0x20000000) { //2.将中断向量长重定向到应用程序地址 SCB->VTOR=APP_ADDRESS; //3.获取应用程序的栈顶地址和复位处理函数地址 pFunction app_reset_handler =(pFunction) (*(__IO uint32_t*)(APP_ADDRESS + 4)); __set_MSP(*(__IO uint32_t*)APP_ADDRESS); //4.跳转到应用程序 app_reset_handler(); }}

记录|智能视觉人体追随
前言 本设计为本人的本科毕设,此文用于记录分享。相关设计指标如下:
设计主控电路及合适的底部运动结构;设计箱体的整体结构。
设计符合航空托运标准的USB接口的充电结构及电源电路的设计,并能够提供在0.5m/s的运行速度下3小时的续航。
设计跟随模块选择合适的跟随识别方案,要求能够设置保持跟随距离分别在50cm、100cm、200cm并且预设跟随值与实际测量距离值误差不高于15%。
选择合适的控制方法进行运动结构的驱动设计,要求设计时速可以达到0.15m/s~0.5m/s。
设计避障模块,可识别200cm内的障碍物,精度±2cm。
设计语音播报模块,当用户与行李箱距离超过300cm或超出30s无识别时发出红色LED灯并有声音警报声。
上位机/APP终端:
最终所有设计任务均已实现。
MaixCam MaixCam是sipeed于24年推出的一款嵌入式智能摄像头,具有强大的AI计算能力,本设计与AI相关的功能都运行在此平台上。 MaixCam支持两种开发方式:MaixVision与Mai ...
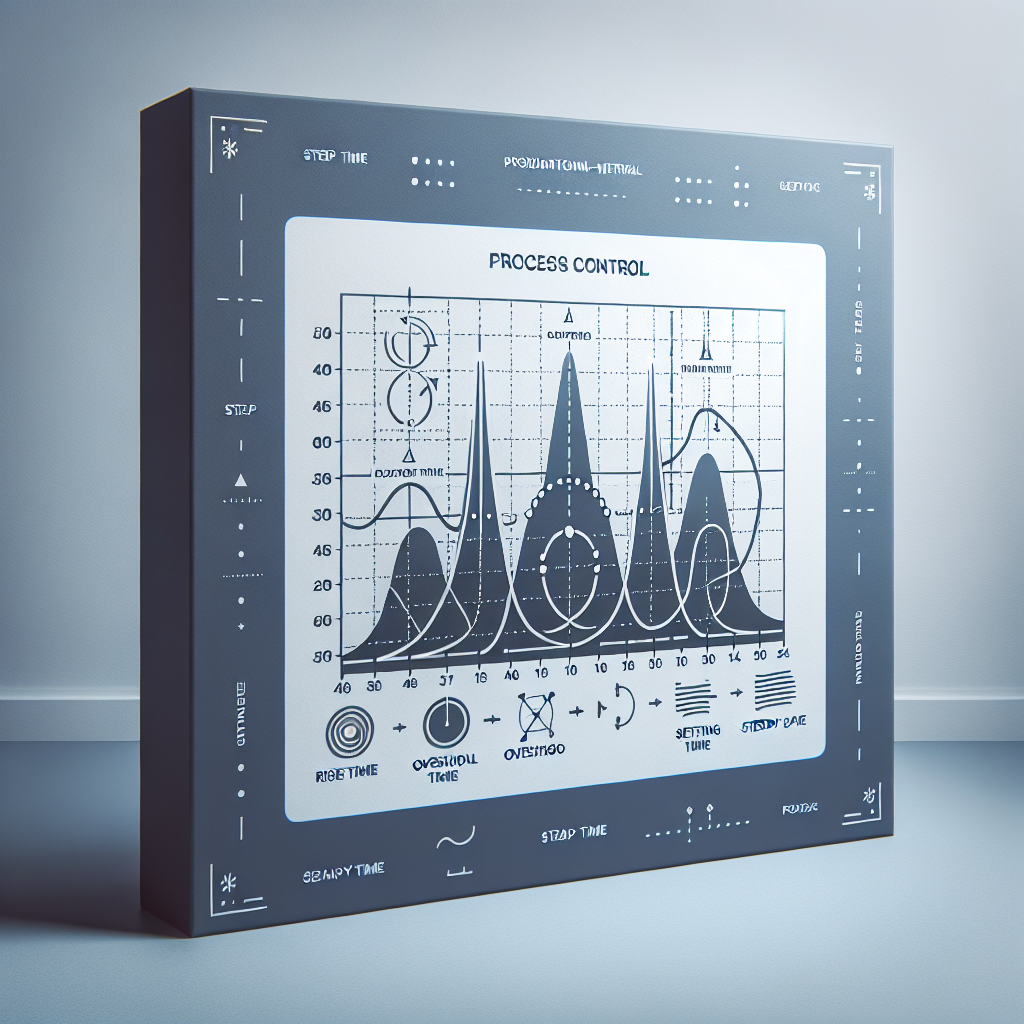
过程控制系统
前言 所使用的教材为机械工业出版社出版的《过程控制系统》,编者为王再英,刘淮霞,彭倩。书本涉及知识很全面,包括各种变送器,传感器等,本文仅对一些个人感兴趣的地方进行记录。
PID控制 PID计算是对误差$e$进行的,即$给定值SV$与$测量值PV$之间的偏差。模拟理论式如下:
输出值MV=\frac{1}{P}(e+\frac{1}{T}\int_{}^{} e\, dt+T_D\frac{d_e}{d_t})其中,P为比例度,区别于比例增益$K_p$,T为积分常数。 从过程控制学科的角度来说,经历了由模拟到数字的过程,如模拟的经典型号DDZ-Ⅲ,其电路分析在课本P76~85。数字电路理论推导在P89,主要涉及对模拟理论式的离散化以及采用实际微分运算(对传递函数进行反拉普拉斯变换后替换)。
PID的派生PI-D 即微分先行的PID控制算法,具体做法是将微分改为仅对测量值进行,而不是误差值,目的是消除微分冲击的影响。
I-PD 即比例微分先行,做法同上,可去除比例冲击。
前馈控 ...
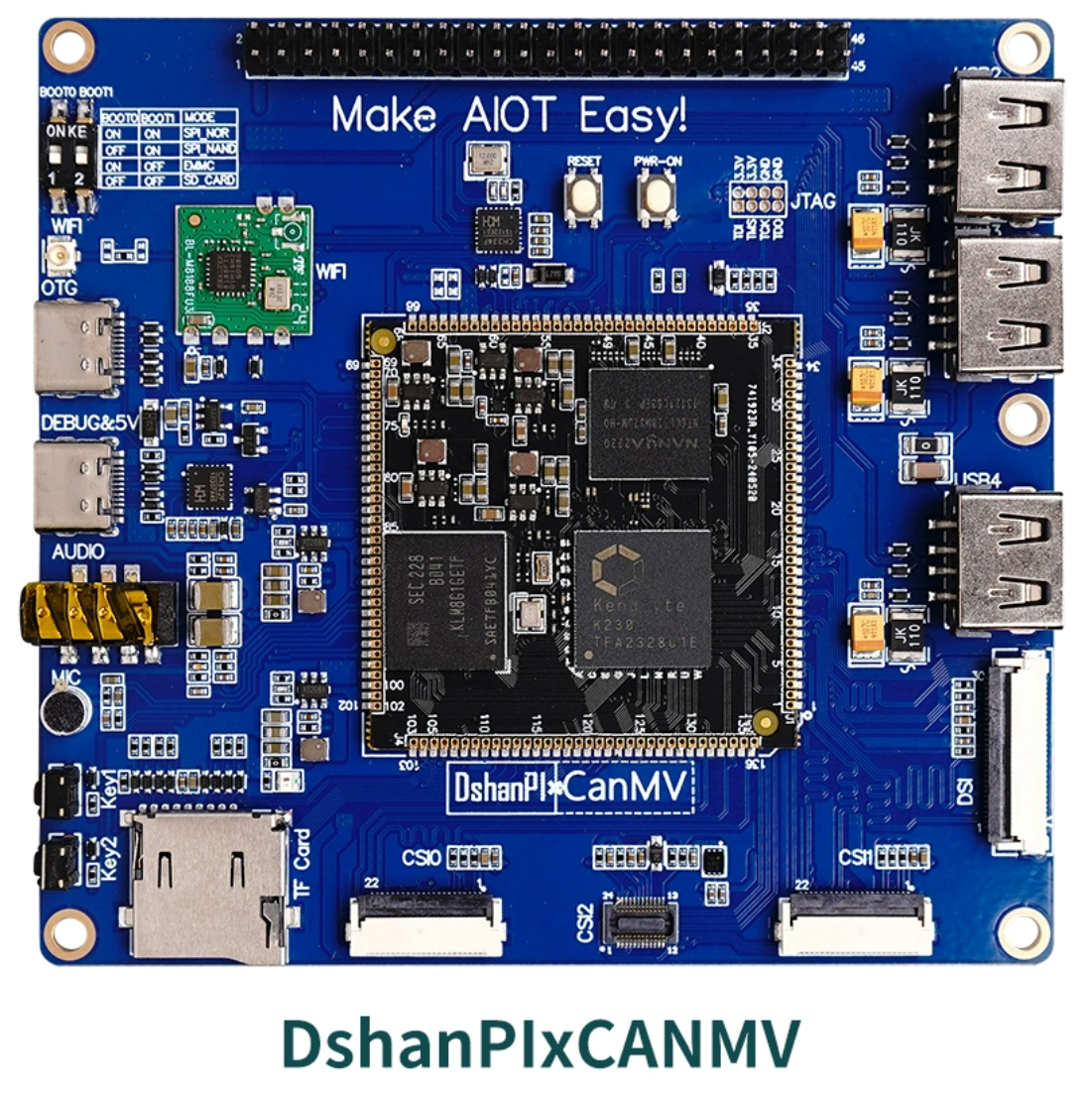
韦东山Canmv|AIOT开发
前言 这是个委托,要求完成串口的配置。
预备 简单网络查询即可得知板子官方资料网站,得到资料下载网站。查阅硬件原理图即可得知所需UART串口的GPIO号,本次使用串口2,即TXD:44,RXD45,对照实际硬件原理图,得知TXD:5,RXD:7。
使用stty工具查询串口配置:123456/sys/kernel/config/usb_gadget/demo # stty -F /dev/ttyS2speed 9600 baud; line = 0;intr = ^C; quit = ^\; erase = ^?; kill = ^U; eof = ^D; eol = <undef>;eol2 = <undef>; swtch = <undef>; start = ^Q; stop = ^S; susp = ^Z; rprnt = ^R;werase = ^W; lnext = ^V; flush = ^O; min = 1; time = 0;-brkint -imaxbel
通过TTL转USB工具 ...
C/C++ | 构建
前言 最近在处理Linux交叉编译,多工程结合的问题,决定从头认真学一下构建工具Makefile、CMAKE,此文为记录,学习路径为gcc->Makeflie->CMAKE。
编译原理 首先,所有的文件本质上都是一串字符串,它的后缀只是方便人类,对计算机并不是那么重要(尤其是Linux),完整的编译过程如下:由上图易知主要有四个步骤:
预处理(*.i -E):进行字符段的替换,如include、define
编译(*.s -S):将文本文件翻译为汇编文件
汇编(*.o -C):将.s文件转化为可重定位目标程序(relocatable object program),或者说机器语言
链接(可执行文件):链接所有.o文件,产生最终的可执行文件
GCC GCC(GNU Compiler Collection),是一个开源编译软件集合,在官方手册中能看到其最权威的介绍。在Linux中,直接使用apt install gcc即可;而在Windows中,使用Mingw,其是GCC(GNU Compiler Colle ...
记录|2024.6课设
前言作为我校的优良传统,本次小学期布置的课设任务是······其实不重要,毕竟允许使用核心板、现成模块,整体的难度其实比较低,无非是读几个adc,运行几个灯\电机,学不到什么东西,之前学习了lvgl用esp32做了个手表,那这次就用stm32作为主控吧。任务:移植lvgl作为用户交互界面,并适配自购的电容触控板,使用SquareLine Studio设计ui,并编写合适的回调函数处理相关任务。原件清单:
立创开发板·天空星stm32f407vet6
320x240,2.4寸tftlcd(ili9341)
2.4寸电容触摸屏(FT6636U)
模块调试在移植上层应用LVGL前,我们需要先保证底层驱动是正常的,即成功点亮屏幕、读取触控坐标
屏幕本次课设我使用的屏幕模块其驱动ic是ili9341,四线SPI(SCL、SDA、DC、CS),另有RES复位引脚和BLK背光控制引脚,直接使用商家的例程即可点亮屏幕,在此我只介绍将商家的软件SPI换为硬件SPI+DMA123456789// 关于LCD接线-------------------------------------------- ...
论文写作利器Latex
介绍Latex 最初的设计目标是分离内容与格式,以便作者能够专注于内容创作而非版式设计,并能以此得到高质量排版的作品。借助它的上百条指令,允许用户在几天甚至几小时内得到高质量的排版作品。
使用笔者使用的Latex编辑软件为Texstudio。如果嫌配置本地环境麻烦,可使用在线网站Overlaef。详细的入门教程可参考一大佬的git仓库,里面提供了Linux、Windows、MacOS三端编译的例程与基本用法。
构成一篇Latex文章由三个部分构成:
文档类声明文档类声明定义了文档的整体格式和类型,比如文章、报告、书籍等。它通常是LaTeX文档的第一行代码。 1\documentclass[⟨options⟩]{⟨class-name⟩}
导言区导言区包含所有在文档主体前需要设置的内容,如加载宏包、定义新命令、设置页面格式等。
文档主体文档主体包含实际的文档内容,并且必须包含在 \begin{document} 和 \end{document} 环境之间。完整例子如下:12345678910% 文章类声明\documentclass[twocolumn]& ...
理论|自动控制原理
信号与系统 “信号与系统”课程涵盖信号的分类与特性、系统的基本概念与分类、时域与频域分析方法(如卷积、傅里叶变换、拉普拉斯变换和Z变换)、滤波器设计、采样定理以及调制与解调技术。它旨在帮助学生理解和分析各种信号与系统,应用数学工具进行分析与设计,并解决实际工程问题中的信号处理和系统设计挑战,是电子信息类专业的核心基础课程。
傅里叶傅里叶变换,将一个时间域信号$f(t)$转换为频率域信号$F(ω)$:
F(ω)=∫_{−∞}^∞f(t)e^{−jωt}dt逆傅里叶变换,将频率域信号$F(ω)$ 转换回时间域信号$f(t)$:
f(t)=
\frac{1}{2π}∫_{−∞}^∞F(ω)e^{jωt}dω拉普拉斯变换 实际上是傅里叶变换的普适化版本,在傅里叶的基础上
F(s)=L{f(t)}=∫_0^∞f(t)e ^{−st}dt卷积卷积(Convolution)是数学、信号处理和计算机科学中的一种运算,其数学定义如下:
(f∗g)(t)=∫_{−∞}^∞f(τ)g(t−τ)dτ
离散形式:(f∗g)[n]=∑_{m=−∞}^∞f[m] ...